Real-Time Multi-SLAM System for Agent Localization and 3D Mapping in Dynamic Scenarios
Abstract
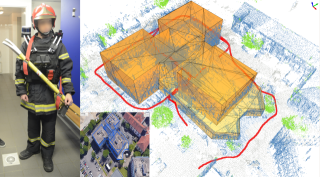
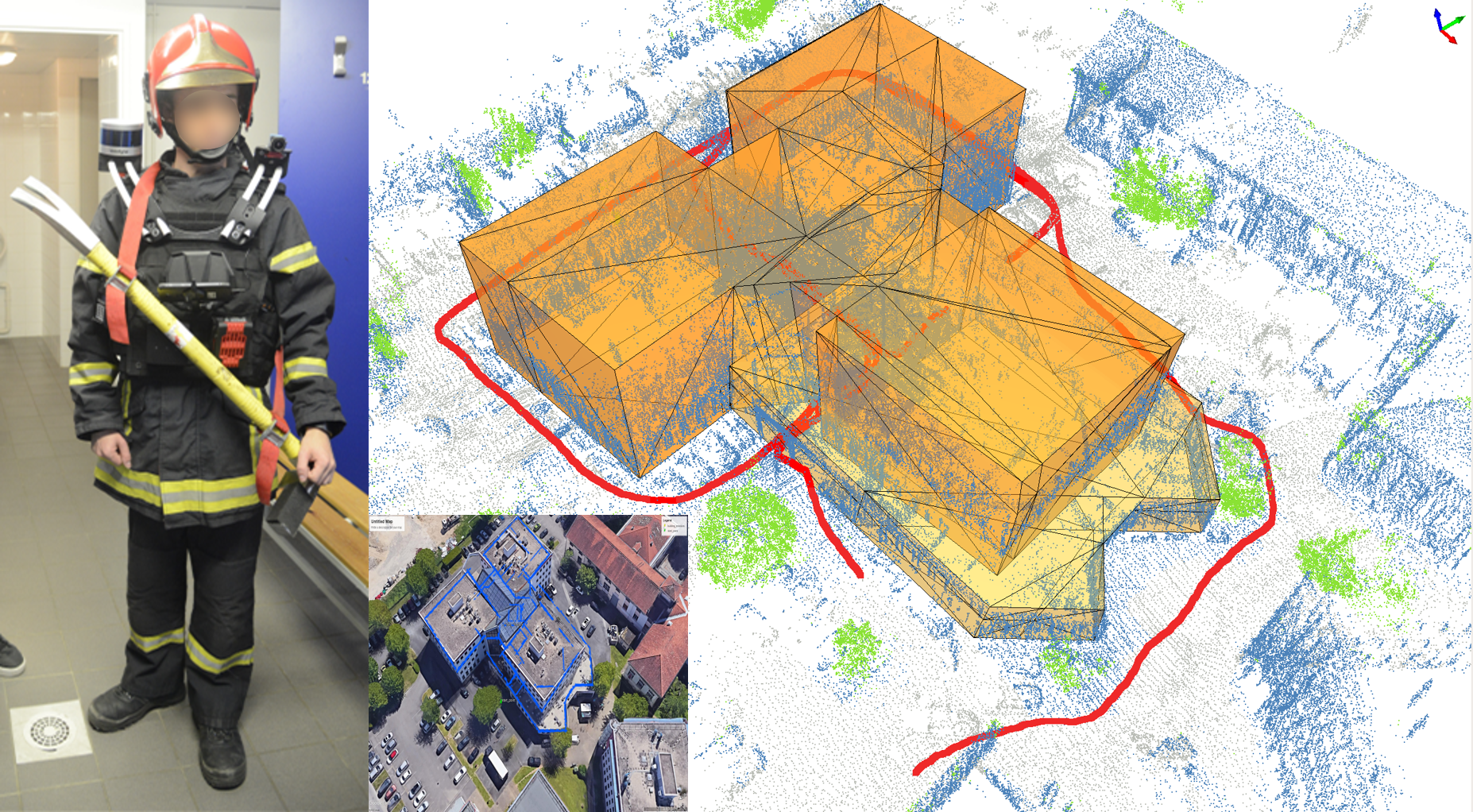
This paper introduces a Wearable SLAM system that performs indoor and outdoor SLAM in real time. The related project is part of the MALIN challenge which aims at creating a system to track emergency response agents in complex scenarios (such as dark environments, smoked rooms, repetitive patterns, building floor transitions and doorway crossing problems), where GPS technology is insufficient or inoperative. The proposed system fuses different SLAM technologies to compensate the lack of robustness of each, while estimating the pose individually. LiDAR and visual SLAM are fused with an inertial sensor in such a way that the system is able to maintain GPS coordinates that are sent via radio to a ground station, for real-time tracking. More specifically, LiDAR and monocular vision technologies are tested in dynamic scenarios where the main advantages of each have been evaluated and compared. Finally, 3D reconstruction up to three levels of details is performed.
Fichier principal
 IROS_2020.pdf (9.59 Mo)
Télécharger le fichier
IROS_2020.pdf (9.59 Mo)
Télécharger le fichier
 Agent_based_intro_google_earth.png (3.61 Mo)
Télécharger le fichier
Agent_based_intro_google_earth.png (3.61 Mo)
Télécharger le fichier
{kind=link}
Origin : Files produced by the author(s)
Format : Figure, Image
Loading...